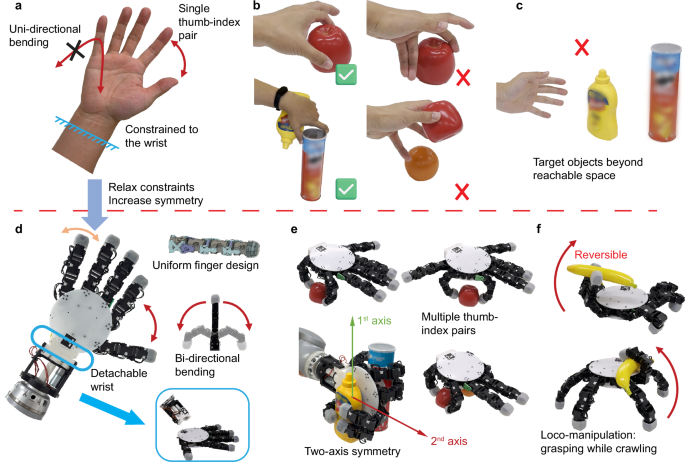
Researchers present a detachable, symmetric and reversible multi-finger robotic hand that can detach from a robotic arm, crawl autonomously to retrieve objects beyond the arm’s reach, and reattach while maintaining secure grasps; prototypes demonstrate multi-object carry (up to four objects in experiments) and a five-finger power grasp holding up to 2 kg. The design leverages genetic-algorithm optimization, CPG-based locomotion and a screw-based docking interface, enabling failure recovery and role-switching between locomotion and manipulation; commercial implications include potential applications in warehouse automation, inspection in confined spaces, and prosthetics/augmentation, though the system remains at a prototype/demo stage.
Market structure: The detachable, reversible crawling hand disproportionately benefits vendors of perception compute (NVDA), vision/sensor suppliers (Intel’s RealSense product line), industrial robot OEMs and end‑effector/component suppliers (e.g., ABB, FANUY/KUKA supply chain) while reducing addressable spend for full mobile base + arm integrators. Expect incremental demand for high‑performance GPUs and embedded vision over the next 6–24 months (pilot → early commercial) giving NVDA pricing power for AI inference hardware; legacy CPU firms (INTC) are unlikely to capture this GPU‑driven workload without product pivots. Risk assessment: Tail risks include US export controls on high‑end GPUs, a high‑profile safety/recall event for autonomous crawlers, or actuator supply shocks (servos/rare earth magnets) causing deployment delays; probability low but impact high. Time horizons: immediate (days) — PR/partner announcements create limited ripples; short (3–12 months) — pilots and early contracts; long (2–5 years) — potential structural reallocation of automation capex. Hidden dependencies: solutions lock into specific stacks (CUDA/NVDEC, RealSense) and proprietary docking patents, creating vendor concentration risk. Trade implications: Direct plays — establish a 2–3% long NVDA position as a core way to capture accelerated inference/vision demand over 6–18 months, hedged with a 1–2% position in 3‑month OTM puts if GPU export headlines rise. Pair trade — go long ABB (ABB, 1–2% portfolio) vs short INTC (1%); ABB benefits from industrial integration spend while INTC faces competitive erosion in vision/edge compute; rebalance if NVDA/INTC implied vol diverges >30%. Options — prefer NVDA 6–12 month call spreads (cost‑contained) targeting 20–40% upside; buy INTC 3‑6 month puts as cheap downside conviction if guidance deteriorates. Rotate 5–10% from consumer cyclicals into industrial automation/semicap equipment over 2–6 weeks, add on pullbacks of 5–10%. Contrarian angles: Consensus understates modular end‑effector TAM — if adoption follows a 10–20% CAGR in warehouse/service robotics, smaller component suppliers (servo makers, silicone tactile suppliers) could meaningfully re-rate; conversely NVDA may be overbought short‑term — avoid naked long delta and use spreads. Historical parallels: early cobot waves took 3–7 years to monetize broadly; expect slow revenue recognition, so prefer staged exposure and volatility‑weighted option tactics. Unintended consequences: rapid commoditization or legal IP fights could compress margins across small OEMs — keep individual position sizes <3% until orderflow/PO evidence emerges.
AI-powered research, real-time alerts, and portfolio analytics for institutional investors.
Request DemoOverall Sentiment
mildly positive
Sentiment Score
0.25
Ticker Sentiment